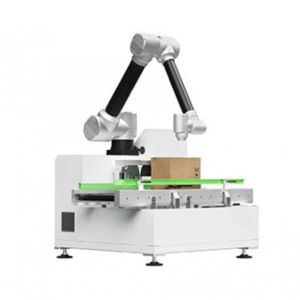
The Collaborative Spider Hand is a bionic, multi-degree-of-freedom robotic arm system built with modular joints and intelligent collaborative control. It is engineered for industrial automation gripping, medical precision operations, and rescue tasks in hazardous environments.
This system delivers high flexibility, redundant safety, and real-time path planning, enabling stable and accurate manipulation in complex working conditions.